升研教育考研频道为23考研、24考研的同学们整理了“沈阳工业大学2022年考研真题:827自动控制原理”的相关信息,希望对正在备考的你有所帮助。考研复习效率不高怎么办?自己备考抓不住重点?想报考985/211等热门院校,但是没把握?升研教育推出考研集训营,全日制封闭式面授,10余年授课经验的老师,浓厚的学习氛围助你冲击目标、一战上研!
沈阳工业大学2022年考研真题:827自动控制原理
适用专业:081100控制科学与工程、085406控制工程
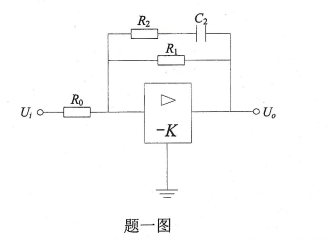
一、(20分)
已知题一图所示有源网络,试:
(1)推导其传递函数Uo(S)/Ui(S)(10分)
(2)计算其频率特性,分析其特性是超前的还是滞后的(10分)
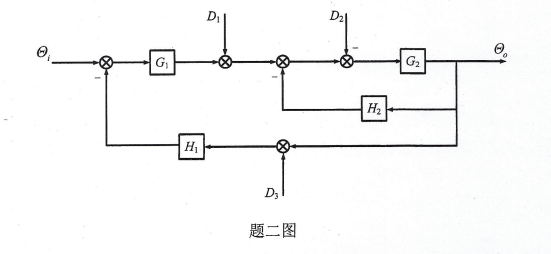
二、(20分)
已知系统的结构图如题二图所示,试通过结构图化简,确定系统在输入Θi(s)和扰动D1(s)、D2(5)、D3(s)同时作用下的输出Θ0(s)。
三、(20分)
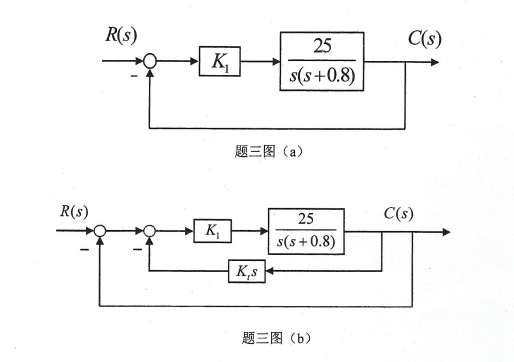
题三图(a)是简化的飞行控制系统结构图,为了改善系统动态性能,设计了测速反馈环节,系统结构图如题三图(b)所示。试:
(1)分别求出两系统的闭环传递函数(4分)
(2)若使测速反馈系统的ωn=6,ζ=1,试确定参数K1和K2的值(4分)
(3)在(2)参数下,求出两系统在单位阶跃信号作用下的输出响应,画出大致曲线(6分)
(4)在(2)参数下,进一步求出两系统的主要动态性能指标,并根据计算结果分析测速反馈对改善系统动态性能的作用(6分)。
四、(20分)
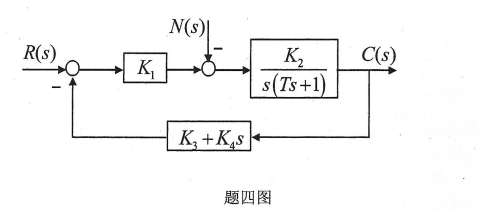
机器人应用反馈原理来控制每个关节的方向。由于负载的改变以及机械臂伸展位置的变化,负载对机器人会产生不同的影响。例如,机械爪抓持负载后,就可能使机器人产生偏差。已知机器人关节指向控制系统如题四图所示,其中,R(s)是预期的关节角,C(s)是实际的关节角,N(s)是负载转矩扰动力矩,要求:
(1)当R(s)=0时,确定N(s)=1/s对C(s)的影响,指出减小其影响的方法(10分)
(2)当N(s)=0,R(s)=1/s时,计算系统的稳态误差,指出减小它的方法(10分)
五、(20分)
已知系统开环传递函数
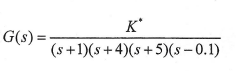
(1)试用劳斯稳定判据确定使闭环系统稳定的K*的取值范围(10分)
(2)画出系统的根轨迹,若要求系统的闭环极点都为负实数,试确定K*的范围(10分)
六、(20分)
已知单位反馈系统的开环传递函数为
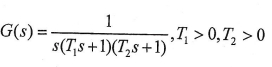
(1)画出系统的奈奎斯特图(10分)
(2)确定使闭环系统稳定的参数不T的范围(7分)
(3)如果给开环系统增加一个积分环节,简要分析它是否对闭环系统稳定性产生影响(3分)。
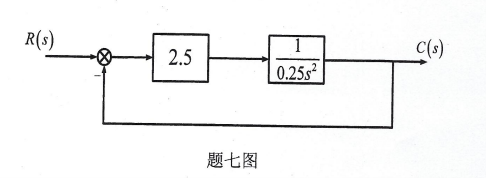
七、(30分)
已知系统的结构图如题七图所示,试设计串联校正网络,使系统相角裕度为50°、截止频率为6。试:
(1)画出校正前系统的伯德图,并求出截止频率和相角裕度(10分)
(2)设计校正网络,求出其传递函数,并画出校正后系统的伯德图(15分)
(3)分析该串联校正网络对改善系统性能的作用(5分)
【24考研辅导课程推荐】24考研集训营、周末辅导班、一对一辅导,相关课程都配有内部讲义及书籍资料,同时还有辅导老师进行学习规划及全程督学,详情可直接在线咨询。
免责声明:本站所提供的内容部分来源于网络搜集整理,由本站编辑上传,仅供个人研究、交流学习使用,不涉及商业盈利目的。如涉及版权问题,请联系本站管理员予以更改或删除。
距2024考研还剩天

三师服务丨全程规划丨大咖领学
三师服务丨全程规划丨大咖领学
三师服务丨全程规划丨大咖领学